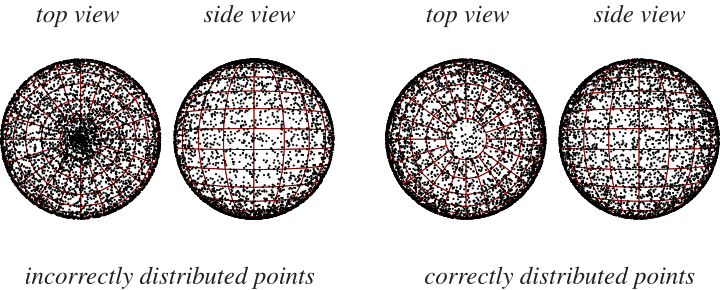
To pick a random point on the surface of a unit sphere, it is incorrect to select spherical coordinates  and
and  from uniform distributions
from uniform distributions  and
and ![phi in [0,pi]](/images/equations/SpherePointPicking/Inline4.svg) , since the area element
, since the area element  is a function of
is a function of  , and hence points picked in this way will be "bunched"
near the poles (left figure above).
, and hence points picked in this way will be "bunched"
near the poles (left figure above).
 random points can be picked on a unit sphere in the Wolfram
Language using the function RandomPoint[Sphere[], n].
random points can be picked on a unit sphere in the Wolfram
Language using the function RandomPoint[Sphere[], n].
To obtain points such that any small area on the sphere is expected to contain the same number of points (right figure above), choose  and
and  to be random variates on
to be random variates on  . Then
. Then
 |  |  |
(1)
|
 |  |  |
(2)
|
gives the spherical coordinates for a set of points which are uniformly distributed over  . This works since the differential element of solid
angle is given by
. This works since the differential element of solid
angle is given by
 |
(3)
|
The distribution  of polar angles can be found from
of polar angles can be found from
 |
(4)
|
by taking the derivative of (2) with respect to  to get
to get  , solving (2) for
, solving (2) for  , and plugging the results back in to (4)
with
, and plugging the results back in to (4)
with  to obtain the distribution
to obtain the distribution
 |
(5)
|

Similarly, we can pick  to be uniformly distributed (so we have
to be uniformly distributed (so we have  ) and obtain the points
) and obtain the points
 |  |  |
(6)
|
 |  |  |
(7)
|
 |  |  |
(8)
|
with  and
and ![u in [-1,1]](/images/equations/SpherePointPicking/Inline35.svg) ,
which are also uniformly distributed over
,
which are also uniformly distributed over  .
.

Marsaglia (1972) derived an elegant method that consists of picking  and
and  from independent uniform distributions on
from independent uniform distributions on  and rejecting points for which
and rejecting points for which  . From the remaining points,
. From the remaining points,
 |  |  |
(9)
|
 |  |  |
(10)
|
 |  |  |
(11)
|
have a uniform distribution on the surface of a unit sphere. This method can also be extended to hypersphere point picking. The plots above show the distribution of points for 100, 1000, and 5000 initial points (where the counts refer to the number of points before throwing away).

Cook (1957) extended a method of von Neumann (1951) to give a simple method of picking points uniformly distributed on the surface of a unit
sphere. Pick four numbers  ,
,  ,
,  , and
, and  from a uniform distribution
on
from a uniform distribution
on  ,
and reject pairs with
,
and reject pairs with
 |
(12)
|
From the remaining points, the rules of quaternion transformation then imply that the points with Cartesian coordinates
 |  |  |
(13)
|
 |  |  |
(14)
|
 |  |  |
(15)
|
have the desired distribution (Cook 1957, Marsaglia 1972). The plots above show the distribution of points for 100, 1000, and 5000 initial points (where the counts refers to the number of points before throwing away).
Another easy way to pick a random point on a sphere is to generate three Gaussian random variables  ,
,  , and
, and  . Then the distribution of the vectors
. Then the distribution of the vectors
![1/(sqrt(x^2+y^2+z^2))[x; y; z]](/images/equations/SpherePointPicking/NumberedEquation5.svg) |
(16)
|
is uniform over the surface  (Muller 1959, Marsaglia 1972).
(Muller 1959, Marsaglia 1972).
 -Dimensional
Spheres." Comm. Assoc. Comput. Mach. 2, 19-20, Apr. 1959.Rusin,
D. "N-Dim Spherical Random Number Drawing." In The Mathematical Atlas.
-Dimensional
Spheres." Comm. Assoc. Comput. Mach. 2, 19-20, Apr. 1959.Rusin,
D. "N-Dim Spherical Random Number Drawing." In The Mathematical Atlas.